2025
-
 Materials Matter: Investigating Functional Advantages of Bio-Inspired Materials via Simulated Robotic HoppingAndrew K Schulz*, Ayah G Ahmad*, and Maegan TuckerIn IEEE International Conference on Robotics and Automation (ICRA) 2025code video pdf arXiv bibtex
Materials Matter: Investigating Functional Advantages of Bio-Inspired Materials via Simulated Robotic HoppingAndrew K Schulz*, Ayah G Ahmad*, and Maegan TuckerIn IEEE International Conference on Robotics and Automation (ICRA) 2025code video pdf arXiv bibtex@inproceedings{schulz2024materials, title = {Materials Matter: Investigating Functional Advantages of Bio-Inspired Materials via Simulated Robotic Hopping}, author = {Schulz*, Andrew K and Ahmad*, Ayah G and Tucker, Maegan}, booktitle = {IEEE International Conference on Robotics and Automation (ICRA)}, year = {2025}, }
2024
-
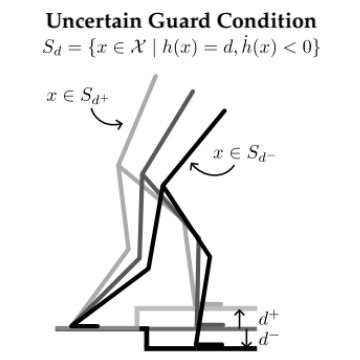
 Synthesizing Robust Walking Gaits via Discrete-Time Barrier Functions with Application to Multi-Contact Exoskeleton LocomotionMaegan Tucker, Kejun Li, and Aaron D AmesIn IEEE International Conference on Robotics and Automation (ICRA) 2024video pdf arXiv bibtex
Synthesizing Robust Walking Gaits via Discrete-Time Barrier Functions with Application to Multi-Contact Exoskeleton LocomotionMaegan Tucker, Kejun Li, and Aaron D AmesIn IEEE International Conference on Robotics and Automation (ICRA) 2024video pdf arXiv bibtex@inproceedings{tucker2023synthesizing, title = {Synthesizing Robust Walking Gaits via Discrete-Time Barrier Functions with Application to Multi-Contact Exoskeleton Locomotion}, author = {Tucker, Maegan and Li, Kejun and Ames, Aaron D}, booktitle = {IEEE International Conference on Robotics and Automation (ICRA)}, year = {2024}, }
2023
-
 Humanoid Robot Co-Design: Coupling Hardware Design with Gait Generation via Hybrid Zero DynamicsAdrian B Ghansah, Jeeseop Kim, Maegan Tucker, and Aaron D AmesIn IEEE Conference on Decision and Control (CDC) 2023video pdf arXiv bibtex
Humanoid Robot Co-Design: Coupling Hardware Design with Gait Generation via Hybrid Zero DynamicsAdrian B Ghansah, Jeeseop Kim, Maegan Tucker, and Aaron D AmesIn IEEE Conference on Decision and Control (CDC) 2023video pdf arXiv bibtex@inproceedings{ghansah2023humanoid, title = {Humanoid Robot Co-Design: Coupling Hardware Design with Gait Generation via Hybrid Zero Dynamics}, author = {Ghansah, Adrian B and Kim, Jeeseop and Tucker, Maegan and Ames, Aaron D}, booktitle = {IEEE Conference on Decision and Control (CDC)}, year = {2023}, organization = {IEEE}, } -
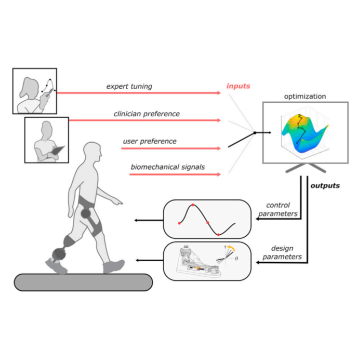 Leveraging user preference in the design and evaluation of lower-limb exoskeletons and prosthesesKimberly A Ingraham, Maegan Tucker, Aaron D Ames, Elliott J Rouse, and Max K ShepherdCurrent Opinion in Biomedical Engineering 2023pdf bibtex
Leveraging user preference in the design and evaluation of lower-limb exoskeletons and prosthesesKimberly A Ingraham, Maegan Tucker, Aaron D Ames, Elliott J Rouse, and Max K ShepherdCurrent Opinion in Biomedical Engineering 2023pdf bibtex@article{ingraham2023leveraging, title = {Leveraging user preference in the design and evaluation of lower-limb exoskeletons and prostheses}, author = {Ingraham, Kimberly A and Tucker, Maegan and Ames, Aaron D and Rouse, Elliott J and Shepherd, Max K}, journal = {Current Opinion in Biomedical Engineering}, pages = {100487}, year = {2023}, publisher = {Elsevier}, } -
 An input-to-state stability perspective on robust locomotionMaegan Tucker, and Aaron D AmesIEEE Control Systems Letters 2023
An input-to-state stability perspective on robust locomotionMaegan Tucker, and Aaron D AmesIEEE Control Systems Letters 2023 -
 Input-to-State Stability in ProbabilityPreston Culbertson, Ryan K Cosner, Maegan Tucker, and Aaron D AmesIn IEEE Conference on Decision and Control (CDC) 2023
Input-to-State Stability in ProbabilityPreston Culbertson, Ryan K Cosner, Maegan Tucker, and Aaron D AmesIn IEEE Conference on Decision and Control (CDC) 2023 -
 A review of current state-of-the-art control methods for lower-limb powered prosthesesRachel Gehlhar, Maegan Tucker, Aaron J Young, and Aaron D AmesAnnual Reviews in Control 2023pdf bibtex
A review of current state-of-the-art control methods for lower-limb powered prosthesesRachel Gehlhar, Maegan Tucker, Aaron J Young, and Aaron D AmesAnnual Reviews in Control 2023pdf bibtex@article{gehlhar2023review, title = {A review of current state-of-the-art control methods for lower-limb powered prostheses}, author = {Gehlhar, Rachel and Tucker, Maegan and Young, Aaron J and Ames, Aaron D}, journal = {Annual Reviews in Control}, year = {2023}, publisher = {Elsevier}, }
2022
-
 Learning controller gains on bipedal walking robots via user preferencesNoel Csomay-Shanklin, Maegan Tucker, Min Dai, Jenna Reher, and Aaron D AmesIn International Conference on Robotics and Automation (ICRA) 2022video pdf arXiv bibtex
Learning controller gains on bipedal walking robots via user preferencesNoel Csomay-Shanklin, Maegan Tucker, Min Dai, Jenna Reher, and Aaron D AmesIn International Conference on Robotics and Automation (ICRA) 2022video pdf arXiv bibtex@inproceedings{csomay2022learning, title = {Learning controller gains on bipedal walking robots via user preferences}, author = {Csomay-Shanklin, Noel and Tucker, Maegan and Dai, Min and Reher, Jenna and Ames, Aaron D}, booktitle = {International Conference on Robotics and Automation (ICRA)}, pages = {10405--10411}, year = {2022}, organization = {IEEE}, } -
 Natural Multicontact Walking for Robotic Assistive Devices via Musculoskeletal Models and Hybrid Zero DynamicsKejun Li, Maegan Tucker, Rachel Gehlhar, Yisong Yue, and Aaron D AmesIEEE Robotics and Automation Letters 2022video pdf arXiv bibtex
Natural Multicontact Walking for Robotic Assistive Devices via Musculoskeletal Models and Hybrid Zero DynamicsKejun Li, Maegan Tucker, Rachel Gehlhar, Yisong Yue, and Aaron D AmesIEEE Robotics and Automation Letters 2022video pdf arXiv bibtex@article{li2022natural, title = {Natural Multicontact Walking for Robotic Assistive Devices via Musculoskeletal Models and Hybrid Zero Dynamics}, author = {Li, Kejun and Tucker, Maegan and Gehlhar, Rachel and Yue, Yisong and Ames, Aaron D}, journal = {IEEE Robotics and Automation Letters}, volume = {7}, number = {2}, pages = {4283--4290}, year = {2022}, publisher = {IEEE}, } -
 Safety-Aware Preference-Based Learning for Safety-Critical ControlRyan Cosner, Maegan Tucker, Andrew Taylor, Kejun Li, Tamas Molnar, Wyatt Ubellacker, Anil Alan, Gábor Orosz, Yisong Yue, and Aaron AmesIn Learning for Dynamics and Control Conference 2022video pdf arXiv bibtex
Safety-Aware Preference-Based Learning for Safety-Critical ControlRyan Cosner, Maegan Tucker, Andrew Taylor, Kejun Li, Tamas Molnar, Wyatt Ubellacker, Anil Alan, Gábor Orosz, Yisong Yue, and Aaron AmesIn Learning for Dynamics and Control Conference 2022video pdf arXiv bibtex@inproceedings{cosner2022safety, title = {Safety-Aware Preference-Based Learning for Safety-Critical Control}, author = {Cosner, Ryan and Tucker, Maegan and Taylor, Andrew and Li, Kejun and Molnar, Tamas and Ubellacker, Wyatt and Alan, Anil and Orosz, G{\'a}bor and Yue, Yisong and Ames, Aaron}, booktitle = {Learning for Dynamics and Control Conference}, pages = {1020--1033}, year = {2022}, organization = {PMLR}, } -
 Robust Locomotion: Leveraging Saltation Matrices for Gait OptimizationMaegan Tucker, Noel Csomay-Shanklin, and Aaron D AmesarXiv preprint arXiv:2209.10452 2022
Robust Locomotion: Leveraging Saltation Matrices for Gait OptimizationMaegan Tucker, Noel Csomay-Shanklin, and Aaron D AmesarXiv preprint arXiv:2209.10452 2022
2021
-
 ROIAL: Region of interest active learning for characterizing exoskeleton gait preference landscapesKejun Li, Maegan Tucker, Erdem Bıyık, Ellen Novoseller, Joel W Burdick, Yanan Sui, Dorsa Sadigh, Yisong Yue, and Aaron D AmesIn IEEE International Conference on Robotics and Automation (ICRA) 2021video pdf arXiv bibtex
ROIAL: Region of interest active learning for characterizing exoskeleton gait preference landscapesKejun Li, Maegan Tucker, Erdem Bıyık, Ellen Novoseller, Joel W Burdick, Yanan Sui, Dorsa Sadigh, Yisong Yue, and Aaron D AmesIn IEEE International Conference on Robotics and Automation (ICRA) 2021video pdf arXiv bibtex@inproceedings{li2021roial, title = {{ROIAL}: Region of interest active learning for characterizing exoskeleton gait preference landscapes}, author = {Li, Kejun and Tucker, Maegan and B{\i}y{\i}k, Erdem and Novoseller, Ellen and Burdick, Joel W and Sui, Yanan and Sadigh, Dorsa and Yue, Yisong and Ames, Aaron D}, booktitle = {IEEE International Conference on Robotics and Automation (ICRA)}, pages = {3212--3218}, year = {2021}, organization = {IEEE}, } -
 Preference-based learning for user-guided HZD gait generation on bipedal walking robotsMaegan Tucker, Noel Csomay-Shanklin, Wen-Loong Ma, and Aaron D AmesIn IEEE International Conference on Robotics and Automation (ICRA) 2021code video pdf arXiv bibtex
Preference-based learning for user-guided HZD gait generation on bipedal walking robotsMaegan Tucker, Noel Csomay-Shanklin, Wen-Loong Ma, and Aaron D AmesIn IEEE International Conference on Robotics and Automation (ICRA) 2021code video pdf arXiv bibtex@inproceedings{tucker2021preference, title = {Preference-based learning for user-guided {HZD} gait generation on bipedal walking robots}, author = {Tucker, Maegan and Csomay-Shanklin, Noel and Ma, Wen-Loong and Ames, Aaron D}, booktitle = {IEEE International Conference on Robotics and Automation (ICRA)}, pages = {2804--2810}, year = {2021}, organization = {IEEE}, } -
 Real-time feedback module for assistive gait training, improved proprioception, and fall preventionMaegan Tucker, and Aaron D AmesJan 2021
Real-time feedback module for assistive gait training, improved proprioception, and fall preventionMaegan Tucker, and Aaron D AmesJan 2021 -
 Evaluation of safety and performance of the self balancing walking system Atalante in patients with complete motor spinal cord injuryJacques Kerdraon, Jean Gabriel Previnaire, Maegan Tucker, Pauline Coignard, Willy Allegre, Emmanuel Knappen, and Aaron AmesSpinal Cord Series and Cases Jan 2021pdf bibtex
Evaluation of safety and performance of the self balancing walking system Atalante in patients with complete motor spinal cord injuryJacques Kerdraon, Jean Gabriel Previnaire, Maegan Tucker, Pauline Coignard, Willy Allegre, Emmanuel Knappen, and Aaron AmesSpinal Cord Series and Cases Jan 2021pdf bibtex@article{kerdraon2021evaluation, title = {Evaluation of safety and performance of the self balancing walking system Atalante in patients with complete motor spinal cord injury}, author = {Kerdraon, Jacques and Previnaire, Jean Gabriel and Tucker, Maegan and Coignard, Pauline and Allegre, Willy and Knappen, Emmanuel and Ames, Aaron}, journal = {Spinal Cord Series and Cases}, volume = {7}, number = {1}, pages = {1--8}, year = {2021}, publisher = {Nature Publishing Group}, }
2020
-
 Human preference-based learning for high-dimensional optimization of exoskeleton walking gaitsMaegan Tucker, Myra Cheng, Ellen Novoseller, Richard Cheng, Yisong Yue, Joel W Burdick, and Aaron D AmesIn 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Jan 2020code video pdf arXiv bibtex
Human preference-based learning for high-dimensional optimization of exoskeleton walking gaitsMaegan Tucker, Myra Cheng, Ellen Novoseller, Richard Cheng, Yisong Yue, Joel W Burdick, and Aaron D AmesIn 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) Jan 2020code video pdf arXiv bibtex@inproceedings{tucker2020human, title = {Human preference-based learning for high-dimensional optimization of exoskeleton walking gaits}, author = {Tucker, Maegan and Cheng, Myra and Novoseller, Ellen and Cheng, Richard and Yue, Yisong and Burdick, Joel W and Ames, Aaron D}, booktitle = {2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)}, pages = {3423--3430}, year = {2020}, organization = {IEEE}, } -
 Preference-based learning for exoskeleton gait optimizationMaegan Tucker, Ellen Novoseller, Claudia Kann, Yanan Sui, Yisong Yue, Joel W Burdick, and Aaron D AmesJan 2020code video pdf arXiv bibtex
Preference-based learning for exoskeleton gait optimizationMaegan Tucker, Ellen Novoseller, Claudia Kann, Yanan Sui, Yisong Yue, Joel W Burdick, and Aaron D AmesJan 2020code video pdf arXiv bibtex@misc{tucker2020preference, title = {Preference-based learning for exoskeleton gait optimization}, author = {Tucker, Maegan and Novoseller, Ellen and Kann, Claudia and Sui, Yanan and Yue, Yisong and Burdick, Joel W and Ames, Aaron D}, booktitle = {IEEE international conference on robotics and automation (ICRA)}, pages = {2351--2357}, year = {2020}, organization = {IEEE}, }
2019
-
 Stabilization of Exoskeletons through Active Ankle CompensationThomas Gurriet, Maegan Tucker, Claudia Kann, Guilhem Boeris, and Aaron D AmesarXiv preprint arXiv:1909.11848 Jan 2019
Stabilization of Exoskeletons through Active Ankle CompensationThomas Gurriet, Maegan Tucker, Claudia Kann, Guilhem Boeris, and Aaron D AmesarXiv preprint arXiv:1909.11848 Jan 2019 -
 Towards variable assistance for lower body exoskeletonsThomas Gurriet, Maegan Tucker, Alexis Duburcq, Guilhem Boeris, and Aaron D AmesIEEE Robotics and Automation Letters Jan 2019video pdf arXiv bibtex
Towards variable assistance for lower body exoskeletonsThomas Gurriet, Maegan Tucker, Alexis Duburcq, Guilhem Boeris, and Aaron D AmesIEEE Robotics and Automation Letters Jan 2019video pdf arXiv bibtex@article{gurriet2019towards, title = {Towards variable assistance for lower body exoskeletons}, author = {Gurriet, Thomas and Tucker, Maegan and Duburcq, Alexis and Boeris, Guilhem and Ames, Aaron D}, journal = {IEEE Robotics and Automation Letters}, volume = {5}, number = {1}, pages = {266--273}, year = {2019}, publisher = {IEEE}, }
Download bibtex.